Предисловие Franchesco Meschina.
Многие моделисты знакомы с XFoil, известной программой Марка Дрелы и Гарольда
Юнгена.
Эта программа выполняет симуляцию двухмерного воздушного потока вокруг
изолированного профиля без учета многих 3D эффектов в том числе индуктивного
сопротивления.
Этот вид анализа хорошо подходит для сравнения профилей, но требует
дополнительной работы для дальнейшего анализа характеристик крыла или всего ЛА.
Довольно сложной задачи включающей множество переменных и требующей учета
многих факторов.
По причине своей большой важности не только для моделистов, но и для большой
авиации эта «проблема» исследовалась уже давно, и для ее решения было
предложено много методов. В том числе - VLM (vortex lattice method).
Не вдаваясь в подробности этого метода можно сказать, что в основе VLM, лежит
разбиение несущих поверхностей ЛА на набор панелей. Каждая панель имеет
присоединенный подковообразный вихрь. Используя несколько граничных условий
можно рассчитать подъемную силу и сопротивление, создаваемое каждым
присоединенным вихрем. Просуммировав вклады всех отдельных вихрей можно
получить характеристики всей несущей поверхности.
По причине сложности расчетов в VLM, он не мог быть широко использован в «до
цифровую эпоху». Только с появлением компьютеров после 60х годов прошлого
столетия VLM показал себя как мощный инструмент и был использован для изучения
и создания множества различных аэродинамических проектов.
Несколько лет назад метод стал доступен для моделистов, когда Марк Дрела и его
группа выпустили программу AVL. Но аналогично как и в случае с программой
Profili2 (Stefano Duranti), VLM стал более доступен для неспециалистов, с
появлением программы Andre Deperrois XFLR5.
Программа Andre Deperrois внесла новый вклад в анализ. В то время как
классический VLM метод принимает поток воздуха как не имеющий вязкости и
поэтому не совсем реалистичен для малых, модельных чисел Re. В XFLR5
принимается, что вклад вязкого и не вязкого обтекания воздушным потоком,
линейно не зависимы и VLM метод может быть дополнен XFoil анализом, для
получения более реалистичной математической модели.
Deperrois предупреждает, что эта «гипотеза»- о независимости вкладов вязкого и
невязкого обтекания, не подтверждается теорией аэродинамики, поэтому к
результатам VLM нужно относится с осторожностью и они требуют дополнительной
проверки. Поэтому пользователи программы XFLR5 должны относиться с пониманием
некоторых ограничений математических методов положенных в ее основу.
В XFLR5 должна быть «загружена» геометрическая модель несущей поверхности и
набор поляр используемых профилей, для диапазона чисел Re достаточного, чтобы
перекрыть все полетные режимы.Другими
словами, прежде чем начать использовать программу XFLR5, пользователь должен
найти файлы координат профилей которые он использует и подготовить размеры
трехмерной модели ЛА.
Так же нужно помнить, что XFLR5 это просто симулятор для набора физических
переменных и не может дать ответы, кроме тех, на которые мы готовы задать
вопросы. Это удобный инструмент, но задача научить нас хорошо проектировать ЛА
выходит за рамки его применения.
На много лучше подходить к программе с практической точки зрения, зная ее
возможности и ограничения, и то какие ей нужно задавать вопросы. Поэтому
возьмем практический случай, чтобы на его примере найти ответы на некоторые
общие вопросы: определение поляры модели, анализ устойчивости по тангажу,
анализ распределения подъемной силы вдоль размаха крыла, определение
балансировочных отклонений управляющих поверхностей.
Часть 1. Создание тестовой модели.
В качестве тестовой модели возьмем стреловидное ЛК, размахом 1800мм, весом 1200
гр., со следующими "проектными" характеристиками: рабочая скорость 15
м/сек, минимальная скорость 7 м/сек, максимальная экономичная скорость 25
м/сек.
Моделирование начинается с профиля, поэтому считаем, что с этим мы уже
определились, это будут: MH64мод. и PW75.
Когда профиль найден и загружен на ваш компьютер, можно запустить XFLR5 и
начать с импорта файла координат. Из меню File выбираем Load File
и открываем файл типа .dat, (.plr, .wpa).
Теперь, когда у нас есть профили, можно используя модуль XFoil, рассчитать их
поляры. Из меню выбираем Application -> XFoil Direct Analysis.
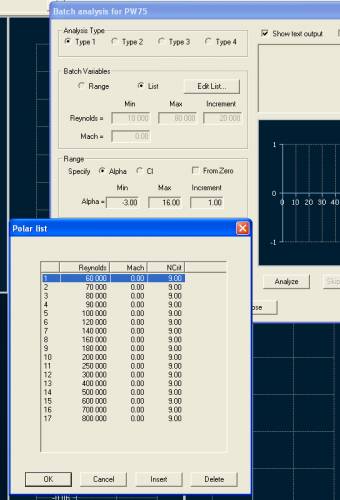
1.Выбираем тип анализа Type 1 (для фиксированной скорости и величины
хорды, и переменной величины коэффициента подъемной силы).
Для каждого профиля мы должны рассчитать набор поляр, перекрывающий диапазон
чисел Re, соответствующий желаемым полетным режимам.
2. Выбираем из меню Polars -> Run Batch Analysis -> Edit List, и
добавляем в список числа от 60000 до 800000, как на рисунке.
3.Дальше нужно задать диапазон и шаг изменения угла атаки. В разделе Range,
выбираем alpha, min -3 град. , max 16 град, increment
1 град.
4.Нажимаем Analize и ждем несколько минут в зависимости от мощности
компьютера.
По окончании расчета, мы получим «семейство» поляр, и сможем рассмотреть их
подробнее, нажав на цифровой клавиатуре число соответствующее графику от 1 до
5.
После того как семейство поляр рассчитано для всех необходимых профилей, пора
приступить к созданию трехмерной модели нашего ЛК. К этому моменту мы должны
знать геометрические размеры, стреловидность, величину крутки и величину
поперечного V.
Выбираем из меню Application
-> Wing Design Wing/Plane -> Define a Plane. В появившемся окне нам нужно ввести
имя модели, затем выбрать MainWing
-> Define.
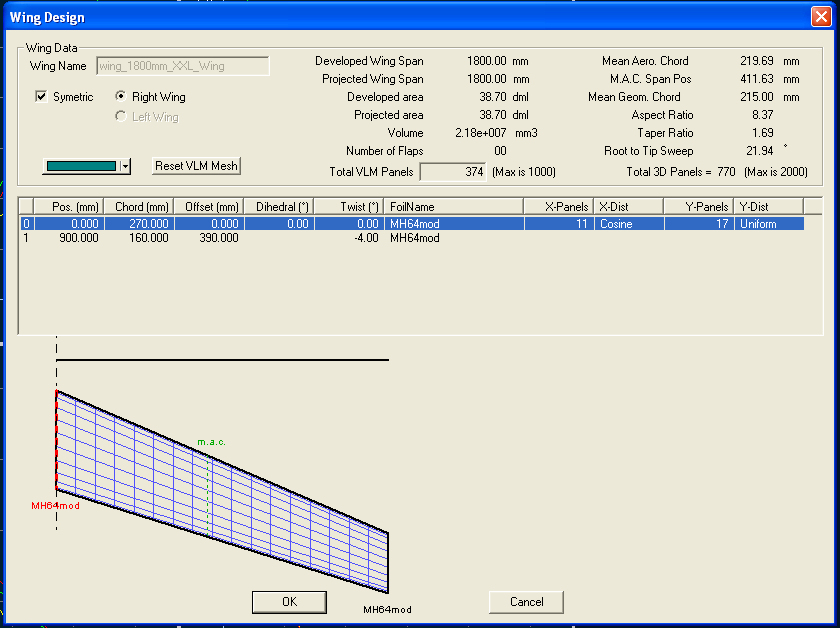
В этом окне мы вводим данные по трехмерной модели. Форма крыла задается в виде
одного или нескольких трапецевидных панелей, для каждого задается: размах,
хорда, смещение от передней кромки, поперечное V, крутка и профиль.
Наша модель вначале будет состоять только из одной панели. Введем ее размеры: Для корневого профиля:
Pos – 0,
Chord – 270мм,
Foil Name - MH64mod. Для концевого профиля:
Pos-900мм,
Chord – 160мм,
Offset – 390мм,
Twist - -4град.
Foil Name – MH64mod.
При расчете используется разбиение крыла на определенное количество панелей - Total
VLM Panels. Чем больше панелей тем расчет точнее. Но большое количество
панелей отнимает у программы много ресурсов, поэтому перед закрытием окна
желательно нажимать на кнопку Reset VLM Mesh, для оптимизации количества
панелей.
После закрытия окна, когда все размеры введены правильно, мы можем увидеть нашу
тестовую модель в 3D View режиме программы. В изометрии Iso или в
одной из трех проекций – X, Y, Z.
В следующей части рассмотрим расчет и анализ поляры модели.
Часть 2. 3D поляра модели.
Нам остался только один шаг до получения поляры модели.
Для расчета выбираем из меню: Polar -> Define Polar Analysis.
Мы должны определить несколько условий. Поэтому для начала мы должны решить
какой вид анализа мы хотим выполнить:
для постоянной скорости - Fix Speed
для постоянной подъемной силы - Fix Lift
для постоянного угла атаки - Fix Alpha.
Для анализа планирующего полета, когда крыло создает столько подъемной силы
сколько необходимо для поддержания горизонтального полета, хорошо подходит
второй вариант - Fix Lift.
Так же мы должны указать вес модели – Plane Weight 1200гр.
Положение ЦТ относительно передней кромки крыла - Mom. Ref. location
215мм.
Далее выбираем метод расчета VLM или LLT. Метод LLT доступен только для
изолированного крыла (без оперения).
Не забываем проверить «чекер» Viscous.
Подтверждаем внесение изменений нажимая на кнопку – Ok.
Теперь мы готовы произвести анализ. Но прежде чем нажать кнопку Analyze,
нужно заполнить раздел Analysis в правой вертикальной панели, мы должны
задать условия расчета:
Например: угол атаки от 0 до 11 градусов с шагом 0,5 градуса. Проверяем «чекер»
Store op.points и запускаем анализ.
В процессе анализа будет выводится журнал в которым могут быть сообщения, что некоторые
рабочие точки – Op.points выходят за пределы подготовленных поляр. С
этим мы разберемся позже.
После завершения работы программы анализа, мы можем посмотреть на результаты ее
работы в нескольких режимах просмотра: Polar View –в виде графиков «поляр», 3D View – в виде трехмерного представления, Operating Pints View – в виде графиков рабочих точек.
Нужно заметить, что мы можем отобразить классическую поляру
модели если выбрать в качестве переменных Liftcoef. и Totaldragcoef., но в
программе под полярой понимается совокупность всех данных полученных в
результате анализа модели. И изменяя переменные мы видим только различные
варианты отображения этой поляры.
На данном этапе мы будем анализировать поляру модели в режиме Polar View.
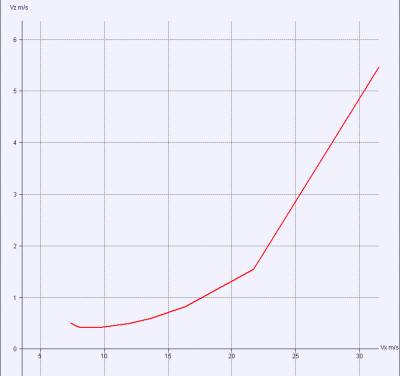
Если не открыт нужный график (Vz от Vx), через контекстное меню выбираем Graph
-> Variables (или на клавиатуре V) и задаем Vz для оси Y-axis и Xinf для оси
X-axis.
Полученный график показывает зависимость скорости снижения от горизонтальной
скорости модели.
Можно заметить, что минимальная скорость снижения 0,4 м/сек соответствует
скорости модели около 10 м/сек - чуть больше чем скорость срыва.
Другая точка – точка максимального качества около 11,5м/сек.
Эти две точки соответствуют двум важным полетным режимам планера: полету на
максимальную продолжительность и полету на максимальную дальность.
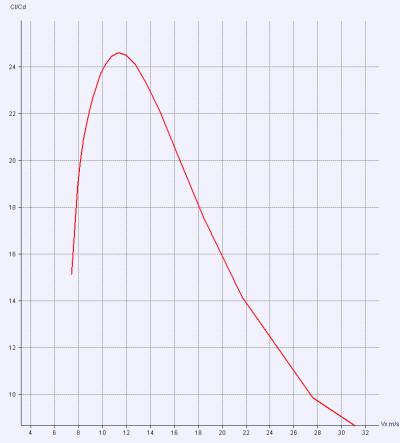
Другой удобный для анализа график – это зависимость качества Cl/Cd от скорости
модели Vx.
На этом графике не только хорошо видна скорость максимального качества
11,5м/сек, но и величина максимального качества модели 24,5.
На этом этапе мы подошли к очень важному вопросу: на какой скорости должна
лететь наша модель, с настройками «по умолчанию», заданным положением ЦТ и при
нулевом отклонении элевонов?
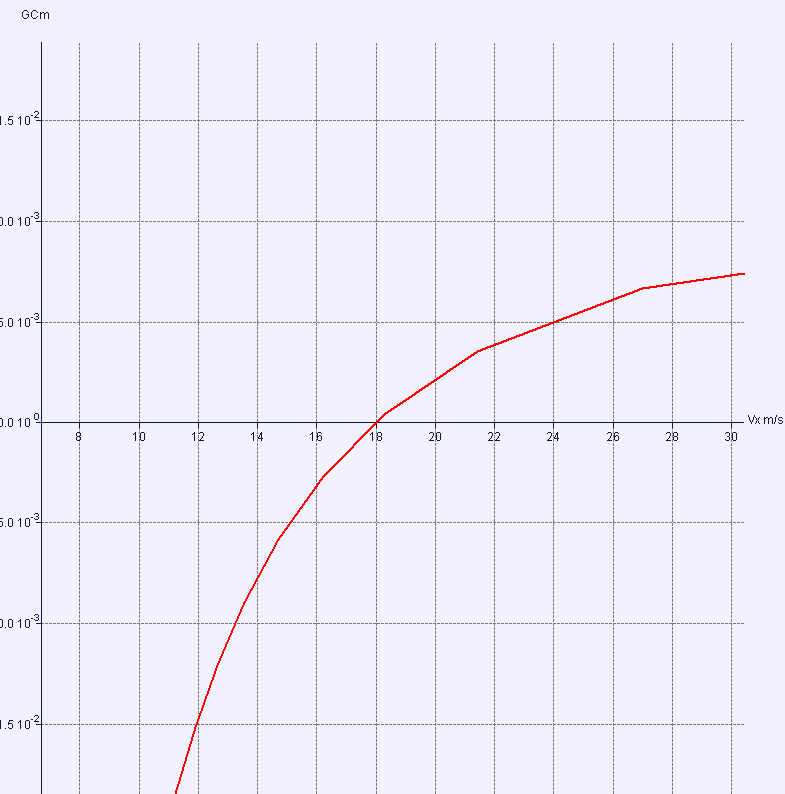
Ответ может быть получен если посмотреть на график зависимости суммарного
момента GCm от скорости Vx. Точка пересечения этого графика с осью X -это и есть, скорость на которую настроена
модель. В нашем случае это 18м/сек. Это скорость равномерного полета с данной
центровкой и положением РВ.
График так же показывает, что более высокая скорость приведет к кабрированию
(нос модели поднимется вверх) и потере скорости, а более низкая скорость
приведет к «пикированию» (нос модели опустится вниз) и набору скорости.
То, что модель настроена на 18м/сек, а не на наивыгоднейший режим планирования
(10 или 11м/сек), неудивительно так мы хотим получить не паритель, а быструю
модель .
На скорости 18м/сек скорость снижения Vz будет выше – 0,8 м/сек, это означает,
что для поддержания модели в воздухе в безмоторном полете нужен восходящий
поток меньше 1 м/сек.
Часть 3. Анализ продолжительности полетного времени с использованием
MotoCalc.
В желательных характеристиках модели, в части 1., была указана максимальная
скорость 25м/сек. Предполагалась не скорость планирования, а скорость
горизонтального моторного полета, при разумном расходе емкости аккумулятора.
Предположим, что в наличии есть такой моторсет: и 1200об/в 45А RimFire 3536 с
винтом APC 9x6, регулятор Phoenix ICE 50 и аккумулятор 2200ma 4S. Попробуем
определить продолжительность полетного времени нашей модели с этим моторсетом.
Можно конечно найти формулы, которые учитывают характеристики мотора,
аккумулятора и эффективность воздушного винта, но мы сделаем проще –
воспользуемся хорошим инструментом, предназначенным для этого, - программой
MotoCalc.
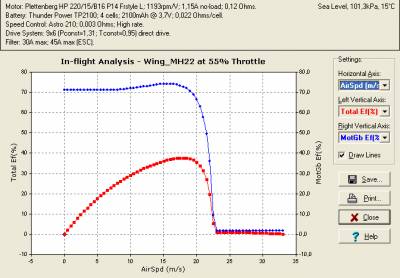
Сначала нужно внести в программу характеристики мотора,
аккумулятора и винта (характеристики модели использовать не будем).
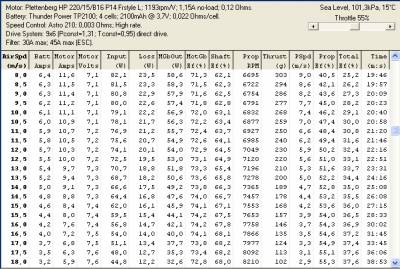
Затем нажимаем кнопку «Рассчитать» и анализируем полученные данные. Когда мы не
указываем параметры модели, MotoCalc рассчитывает только моторсет – получаемую
тягу в зависимости от скорости и положения стика RC передатчика. Результаты
представляются или в виде таблицы или в виде графика.
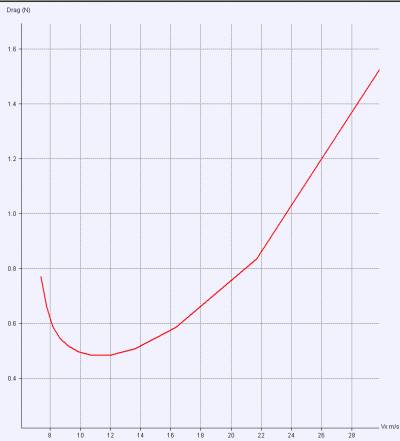
Исходными данными для анализа моторсета будут: скорость модели и сопротивление
модели Drag(N) и соответствующая тяга мотора на этой скорости.
Определяем в программе XFLR5, по графику Drag(N) от Vx, значения сопротивления
на скоростях 12м/сек, 18м/с и 25м/с . Значения увеличиваем на 15%, для учета
сопротивления дополнительных конструктивных элементов на реальном ЛК.
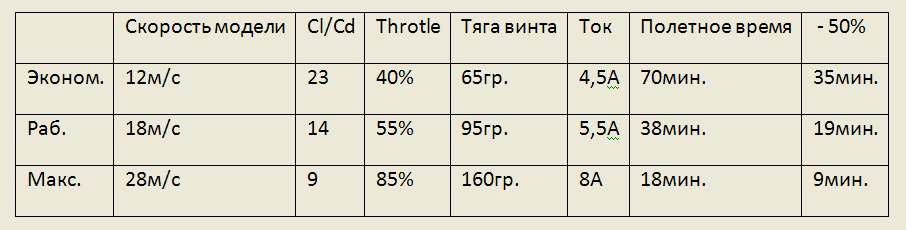
Подбираем в MotoCalc значение Throtle (отклонение стика) для получения нужной
тяги на этих скоростях и получаем ток и полетное время:
Полученное время выглядит слишком оптимистично, т.к. это время для идеального
случая равномерного горизонтального полета, без внешних и управляющих
воздействий. Если принять, что расход емкости аккумулятора при маневрировании
на 30-50% больше, то значение полетного времени становится более реалистичным .