Динамическая устойчивости и управляемости в XFLR5.
Динамическая устойчивости и управляемости в
XFLR5.
Кроме настройки модели по балансировке в целях устойчивого
полета с высоким качеством, необходимо чтобы модель была динамически устойчивой
и хорошо управляемой.
- Устойчивость это характеристика поведения модели в
свободном полете.
- Управляемость это степень реакции модели на команды
пилота.
В XFLR5
v6 добавлена опция для
оценки этих характеристик модели.
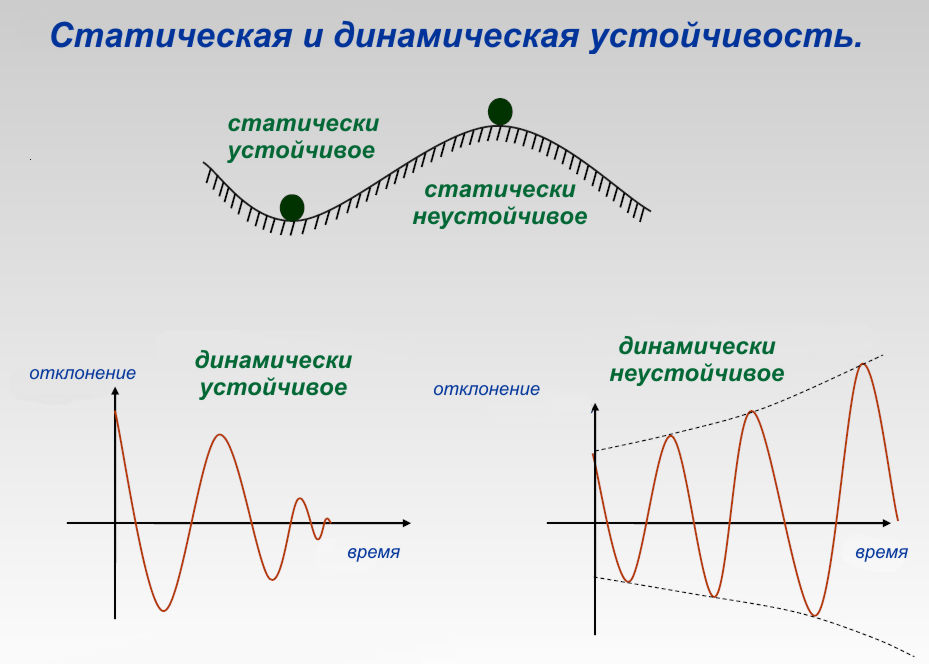
Статическая и
динамическая устойчивость.
Устойчивость ЛА.
- устойчивое состояние для ЛА может быть определено как:
постоянная скорость, угол атаки, угол крена, угол тангажа, направление полета и
высота;
- трудно представить все это в комплексе;
- случайные порывы ветра или управляющие воздействия пилота
выводят ЛА из устойчивого состояния.
- цель анализа устойчивости и управляемости в том, чтобы
оценить динамику во времени поведения ЛА после таких «возмущающих»воздействий.
Естественные
динамические режимы ЛА.
- После того как ЛА подвергся «возмущающему» воздействию,
выводящему его из устойчивого полета, ЛА имеет тенденцию при возвращении в
устойчивое состояние «отвечать» затухающими колебаниями в соответствии с его естественными
динамическими режимами.
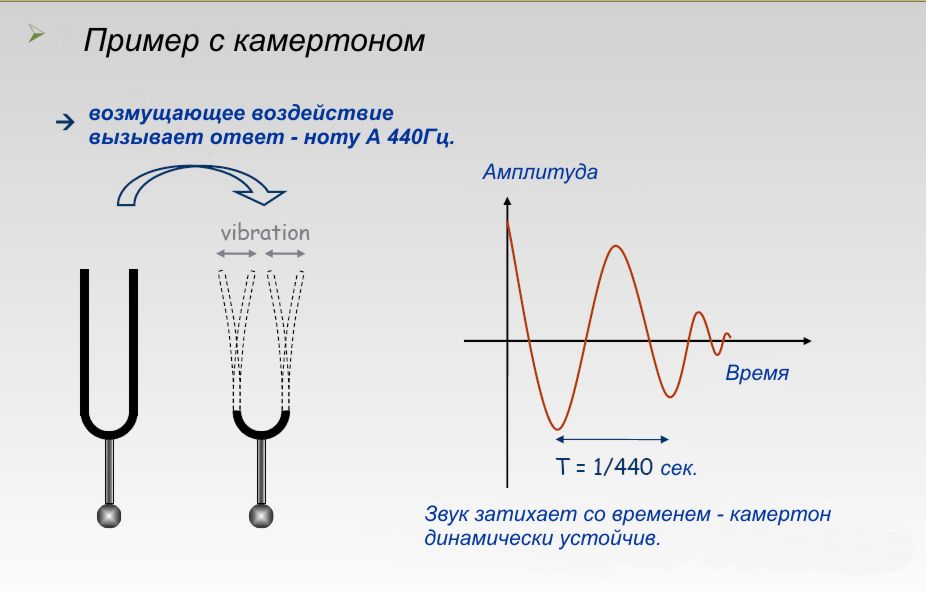
Естественные режимы на примере камертона.
Естественные режимы в аэродинамике.
Пример: фугоид.
- Если модель имеет излишне переднюю центровку она склонна
при отклонении от горизонтального полета к движению по «синусоиде».
-Голландский шаг, спиральная неустойчивость и
длиннопериодический фугоид.
-Остальные режимы обычно хорошо демпфированы и малозаметны.
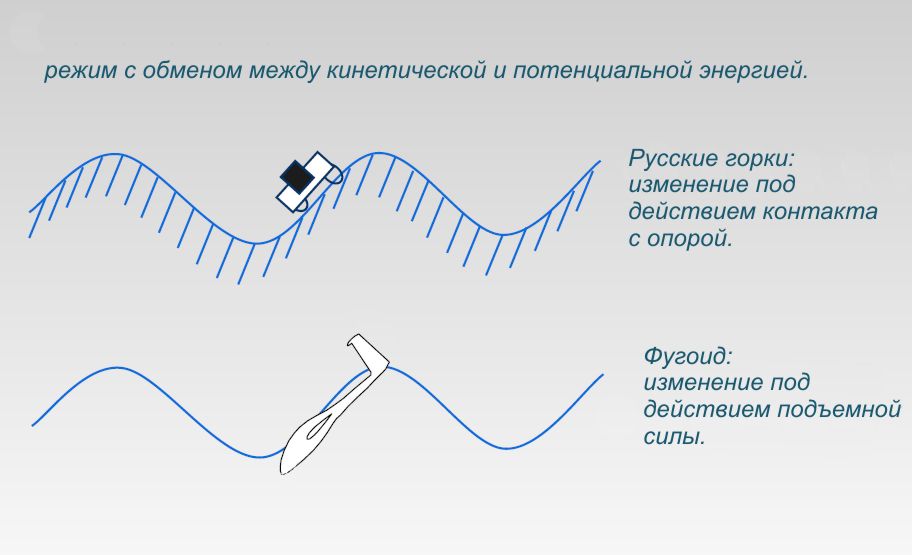
Фугоид – режим
медленного движения ЛА по «синусоиде» с обменом энергии между кинетичекой(скорость) и потенциальной (высота).
Имеет малую частоту, слабо демпфирован, может быть
стабильным или не стабильным.
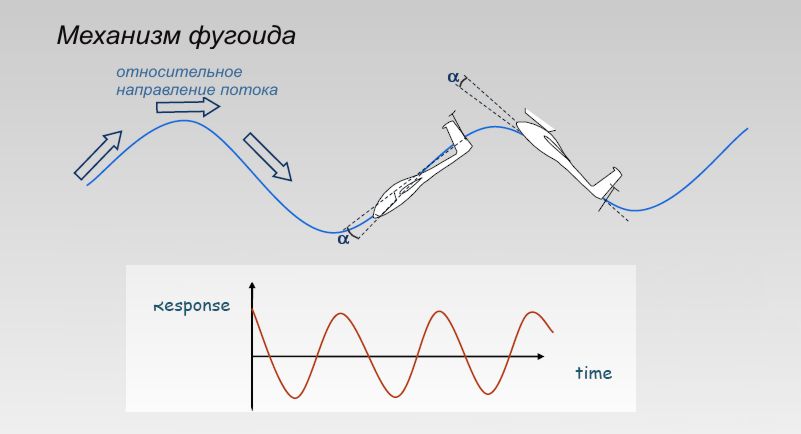
Механика фугоида.
При движении по траектории модель повторяет в цикле
следующие этапы:
Снижение ->Разгон
-> Увеличение подъемной силы -> Подъем ->Торможение -> Уменьшение
подъемной силы -> Снижение
В движении по траектории фугоида, кажущееся направление
потока воздуха изменяет направление. С точки зрения ЛА это изменение – внешнее
воздействие. ЛА реагирует на это воздействие изменяя свое движение вдоль
траектории фугоида. Это происходит потому, наклон кривой Cm=f(α) достаточно
большой (передняя центровка) и ЛА не имеет большой инерционности по тангажу.
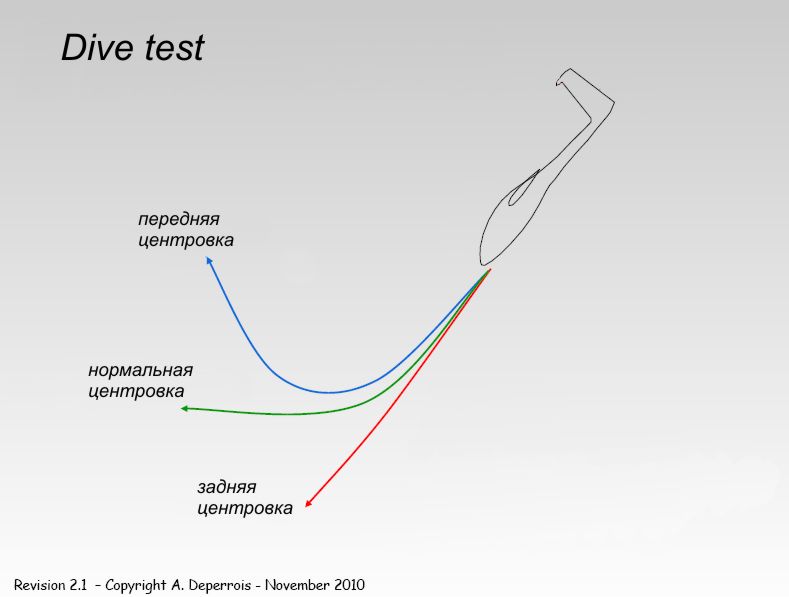
Divetest
Как это связано с ранее сказанным?
При слишком передней центровке :
-ЛА входит в режим фугоида;
-ЛА имеет высокую устойчивость;
- ЛА в фугоиде следует с постоянным углом атаки - как
колесница (тележка) сохраняет свое положение по отношению к склону.
При заднем положении ЦТ:
- ЛА менее стабилен (по отношению к порывам ветра);
- угол атаки в фугоиде не постоянен;
- режим фугоид исчезает;
- не известно как ЛА поведет себя в тесте на пикирование.
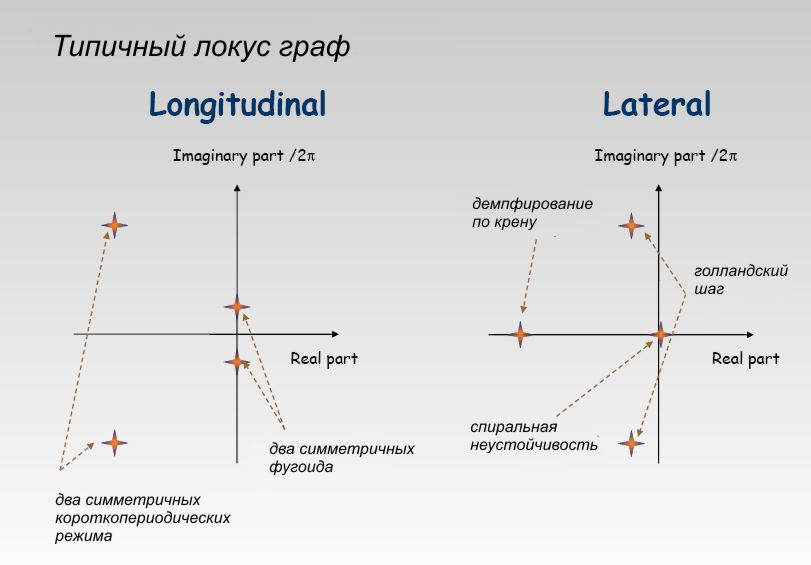
Спиральная
неустойчивость.
- Не колебательный, медленный, плохо демпфированный режим.
Вертикальный стабилизатор реагируя на изменение по крену или
скольжение, отклоняет хвостовую балку вызывая постепенно увеличивающееся
скольжение и крен, переходящее в спираль со снижением, заканчивающееся на
земле.
Требует вмешательства пилота или системы стабилизации, для
предотвращения развития. (ЛК не подвержены или подвержены в меньшей степени).
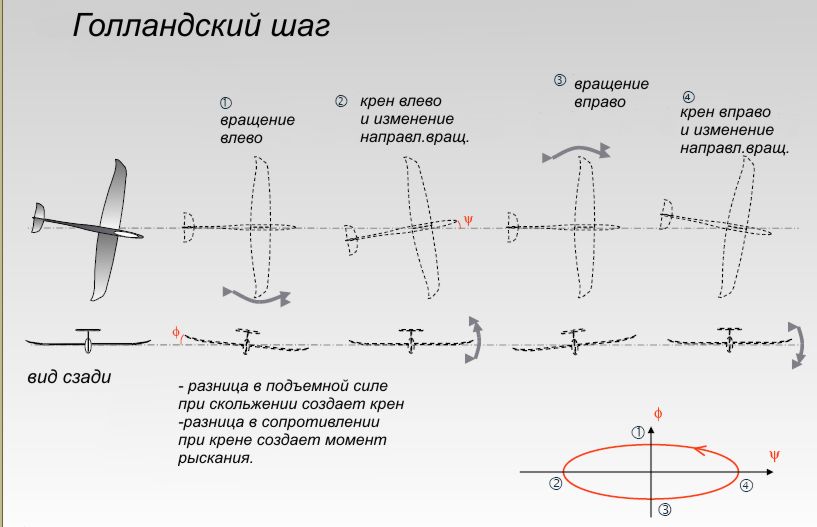
Голландский шаг.
Комбинация характерного колебательного движения по крену –
рысканию, со смещением фазы на Пи/2, слабо демпфированная.
В течение полета,
воздействие в виде порывов ветра или управления от пилота вызывают комплексный
ответ по всем режимам.
- Короткопериодические режимы и крен хорошо демпфированы и
исчезают сразу.
- Фугоид и голландский шаг хорошо заметны для глаз.
- Спиральная неустойчивость требует периодической корректировки
от пилота.
Логично предположить, что продольная (longitudinal) и боковая (lateral) динамика не зависимы и их можно рассматривать по
отдельности.
Переменные
Продольная - longitudinalустойчивость:
u = dx/dt –U0изменение
осевой скорости;
w = dz/dtвертикальная
скорость;
q = dθ/dtскорость
изменения угла тангажа;
θ (theta)угол тангажа.
Боковая – lateralустойчивость:
v = dy/dtизменение
скорости полета;
p = dφ/dtизменение
угла крена;
r = dψ/dtизменение
угла рыскания;
ψ (phi)угол рыскания (направление).
Фактор демпфирования
ζ – (зета) безразмерный коэффициент.
==7
ζ =1 критическое значение коэффициента
демпфирования, при таком значении ЛА без раскачивания возвращается к
стабильному состоянию.
ζ <1 слабое демпфирование,
ζ>1 ЛА
возвращается к стабильному состоянию медленнее чемпри ζ =1
При ζ <<1
частота динамического режима очень близка к натуральной частоте без
демпфирования.
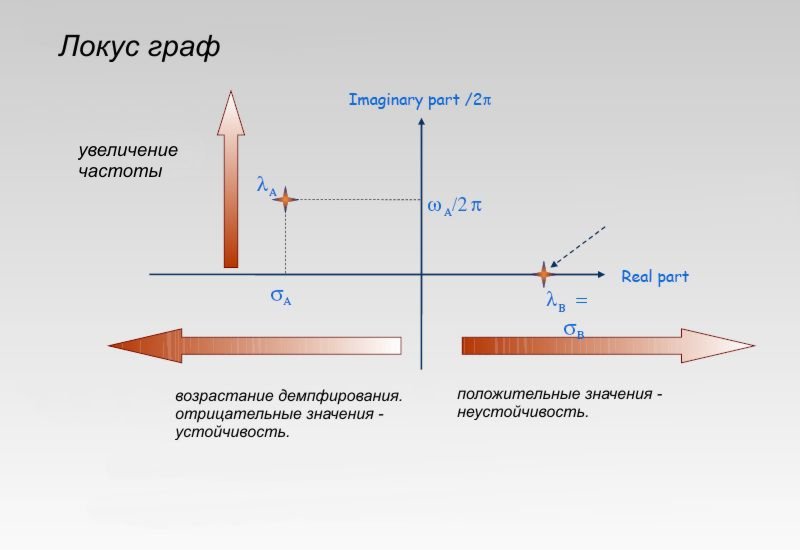
(на
графике перепутаны цвета, в тексте правильно).
Локус Граф
Этот
график есть визуальное представление частоты и демпфирования.
λ =σ1+iωN
ωN
- натуральная
круговая частота;
ωN/2π – натуральная частота;
σ1- константа демпфирования
Типичный Локус Граф.
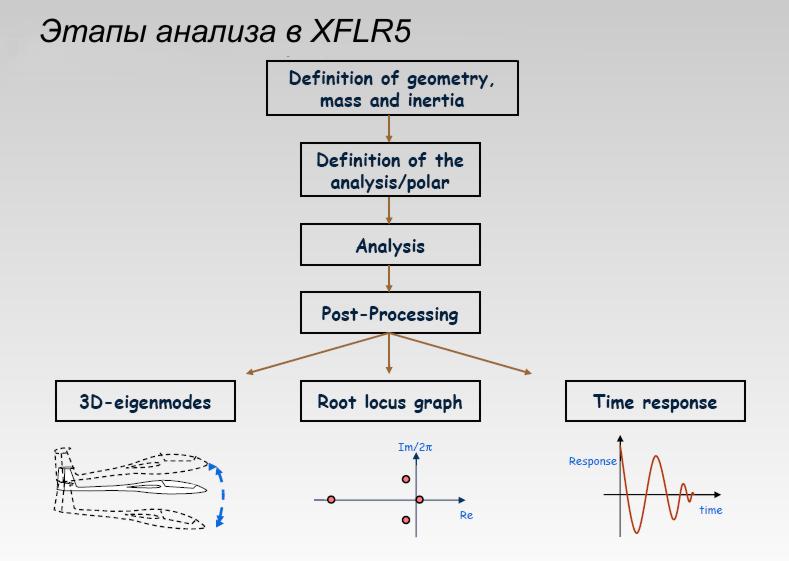
Анализ в XFLR5.
Для
получения графиков «ответов» модели на возмущающие воздействия необходимо
выполнитьследующие шаги:
-
Создать или загрузить геометрию модели и рассчитать поляры используемых
профилей;
-
Заполнить данные по инерционности:
- Вес крыла, фюзеляжа и других
элементов,
- внести данные по
дополнительным сосредоточенным весам: двигатель, аккумулятор, сервомеханизмы,
балласт и т.д.
- проконтролировать получившееся
положение ЦТ и массу модели.
-
Создать новый анализ устойчивость (аналогично как создается анализ поляры
модели);
-
Произвести анализ для одного угла атаки;
-Если
нет критических ошибок, получить результаты в виде:
- 3D представления и анимации,
- Локус графа,
- Графиков динамических режимов
ответов модели на заданные возмущения.