Стреловидные ЛК (летающие крылья) и боковая устойчивость.
Стреловидные
ЛК (летающие крылья) и боковая устойчивость.
RC
Soaring Digest B. & B. Kuhlman
Одна из граней бесхвосток всегда интриговала нас – способность стреловидных ЛК
к полету на большой скорости без проявления склонности к голландскому шагу, и
высокая спиральная устойчивость на низких скоростях, например при парении в
терме.
Это заметно отличается от того, что мы видим у высококачественных классических
планеров.
Конструктор классического планера с крестообразным оперением должен очень
хорошо сбалансировать V крыла и площадь вертикального стабилизатора (поперечную
и продольную устойчивость). Но все равно остается тенденция к голландскому шагу
на больших скоростях и требуется использование противоположного отклонения
элеронов для компенсации спиральной неустойчивости при выполнении круговых
разворотов в парении.
Поскольку и площадь вертикального стабилизатора и геометрическое V крыла не
изменяется в полете, что же тогда позволяет стреловидным ЛК «нарушать правила»
и иметь хорошую устойчивость во всех режимах.
Для ответа на этот вопрос, нам нужно сначала вспомнить основы, поэтому в первых
двух частях мы рассмотрим эффективное V крыла. Как оно влияет на стабильность
модели.
Часть 1. Тангаж, рыскание и крен.
Диаграммы, изображающие эти три оси вращения, можно найти в большинстве книг по
аэродинамике. Простыми словами, отклонение носа модели вверх (кабрирование) или
вниз (пикирование), при вращении вокруг поперечной оси параллельной размаху
крыла - тангаж (ось Y). Отклонение носа модели вправо или влево, когда модель
вращается вокруг вертикальной оси, проходящую через фюзеляж в районе крыла -
рыскание (ось Z). Модель так же может вращаться через ось проходящую через
фюзеляж – крен (ось X).
Отклонение руля высоты (РВ), создает аэродинамическую силу отклоняющую хвост
модели вверх или вниз. При этом нос модели отклоняется в противоположную
сторону. Размер руля высоты и расстояние от него до ЦТ модели определяют его
эффективность. Чем больше размер РВ и чем больше расстояние до ЦТ тем больше
его эффективность и тем сильнее модель реагирует на отклонение стика на
передатчике.
Нужно хорошо представлять, что отклонение РВ изменяет угол атаки крыла, угол
под которым крыло двигается в воздушном потоке. Например, при отклонении РВ
вверх, нос модели отклонится вверх и угол атаки крыла увеличится. Чем больше
отклонение РВ, тем больше угол атаки. При отпускании стика и возвращении РВ в нейтральное
положение крыло так же вернется к «нормальному » углу атаки. Это произойдет
потому, что горизонтальное оперение (стабилизатор вместе с РВ) стабилизирует
положение модели по тангажу (оси Y).
Отклонение руля направления, отклоняет хвост вправо или влево. Нос модели при
этом отклоняется в противоположную сторону. Чем больше отклонение РН, тем
больше отклонение носа - рыскание (ось Z). Но модель вернется к не отклоненному
положению – 0 рыскания, при отпускании стика и возвращении РН в нейтральное положение.
Однако, модель после этого будет иметь другое направление полета – другой курс.
Отклонение элеронов изменяет подъемную силу половин крыла – консолей.
Отклонение элерона вверх увеличивает давление сверху крыла, и уменьшает
подъемную силу части крыла где расположен элерон. При этом, противоположный
элерон отклоняется вниз, увеличивая подъемную силу противоположного крыла. В
результате отклонения элеронов, изменяется подъемная сила с противоположных
сторон крыла, что приводит к крену модели. Чем больше отклонение элеронов, тем
быстрее изменение крена. В поведении модели по оси крена есть существенное
различие от поведения по тангажу и рысканию. Например, для удержания модели на
требуемом угле атаки, нужно постоянное отклонение РВ. Для задания требуемого угла
крена необходимо отклонить на время элероны и затем вернуть их в нейтральное
положение . После того как элероны возвращены в нейтральное положение крыло не
возвращается к исходному нулевому крену. Вместо этого скорость изменения крена
становится нулевой, но крен сохраняется. Таким образом, горизонтальный и
вертикальный стабилизаторы это прямой механизм для сохранения моделью
стабильности положения по тангажу и рысканию, по крену аналогичного механизма
нет.
Боковая (латеральная) устойчивость.
Все вышесказанное об устойчивости модели является упрощением, поскольку крен
никогда не бывает отдельно сам по себе. Крен всегда вызывает другие изменения в
положении модели.
Первое и самое важное, крен вызывает боковое скольжение модели. Если нет
отклонения РВ для изменения угла атаки, и модель отклонилась на определенный
угол по крену, вертикальная компонента подъемной силы становится меньше чем вес
модели. Появившаяся в результате боковая составляющая подъемной силы действует
в горизонтальном направлении. Модель начинает снижаться, увеличивая скорость,
пока возросшая подъемная сила не будет равна массе модели. Модель при этом
ускоряется по круговому пути, из за боковой составляющей подъемной силы. В
начальный момент пока подъемная сила недостаточна для компенсации веса модели,
совместное действие веса модели и боковой составляющей подъемной силы формируют
силу, направленную вдоль размаха и вызывающую боковое скольжение модели. Когда
скорость возрастет подъемная сила скомпенсирует массу модели, эффект центрифуги
скомпенсирует боковую составляющую подъемной силы и скольжение прекратится.
Например, если модель получила крен влево, модель будет скользить влево. Это
эквивалентно рысканию вправо, так как поток воздуха, при этом, обтекает модель
слева. Таким образом скольжение влево может быть вызвано или креном влево или
отклонением РН вправо.
Если модель имеет V крыла (концы консолей выше, чем центральная часть крыла),
боковое скольжение приводит к ситуации, в которой нижнее крыло, на которое
происходит скольжение, встречает поток воздуха на больших углах атаки, чем
верхнее крыло. Это создает восстанавливающую силу. Но нужно заметить, что
нижняя консоль, из за работы на больших углах атаки, создает большее
сопротивление. Это вызывает рыскание которое уменьшает скольжение. Суммарный
результат эффекта от наличия V крыла и в уменьшении скольжения и в выравнивании
модели по крену.
Говорят, что модель имеет статическую боковую (латеральную) устойчивость, если
боковое скольжение вызывает крен в противоположную сторону.
На боковую устойчивость влияет расположение крыла на фюзеляже. Если крыло
расположено в верхней части фюзеляжа, любое боковое скольжение изменяет поток
воздуха над фюзеляжем так, что нижняя консоль, на которую происходит
скольжение, работает на более высоких эффективных углах атаки. И наоборот
консоль, которая находится выше, работает на меньших эффективных углах атаки.
Таким образом, если крыло расположено в верхней части фюзеляжа оно работает
так, как если бы имело некоторый позитивный угол V крыла. Если крыло расположено
в нижней части фюзеляжа оно работает так, как если бы имело отрицательный угол
V крыла. Поэтому высокопланы имеют обычно малый угол V крыла или не имеют его
совсем. Модели с нижним расположением крыла, наоборот обычно имеют существенный
угол V крыла.
Когда модель кренится вправо, угол атаки левой консоли сразу же уменьшается,
правая консоль наоборот работает на больших углах атаки, этому сопутствует и
дифференциальный эффект сопротивления противоположных консолей при изменении
крена. Это происходит только при изменении крена (в процессе), но имеет только
демпфирующий, а не стабилизирующий эффект. Поэтому если крыло находится в
постоянном крене (неизменном, на какое то время), и соответственно консоли не
имеют различия в вертикальной скорости и угле атаки, то и демпфирующих сил не
создается. Нужно так же заметить, что при угле атаки близком к срыву, консоль
наклоняющаяся вниз (при изменении крена) может сорваться и уменьшение подъемной
силы этой (опускающейся) консоли позволит ей свободно провалится.
Стреловидные крылья без фюзеляжа и вертикального стабилизатора имеют большую
боковую устойчивость, так как дифференциальный эффект (различие работы консолей
при наличии скольжения) по геометрическим причинам более выражен. При
скольжении изменение в подъемной силе и сопротивлении противоположных
полукрыльев (консолей) выражены более резко так, как геометрически изменяется
размер (длина ) проекции консоли на плоскость перпендикулярную потоку воздуха.
Небольшая восстанавливающая сила так же создается вертикальным центральным
килем.
Вторая часть будет о поперечной устойчивости (связке рыскание-крен), паразитном
рыскании, путевой устойчивости, спиральной неустойчивости и голландском шаге.
Стреловидные ЛК и боковая устойчивость.
В предшествующей части мы исследовали, тангаж, рыскание и крен. Как на них
влияет отклонение управляющих поверхностей. Мы так же говорили о том, как крен
связан со скольжением и рысканием и как возникают восстанавливающие силы
участвующие в боковой устойчивости.
Часть 2. Связь рыскание-крен.
Говоря о том, что крен вызывает боковое скольжение и затем рыскание, необходимо
добавить, что аналогично и рыскание вызывает скольжение и затем крен. Связь
крена, рыскания и скольжения невозможно разделить.
Как демонстрацию этой связи, представим модель летательного аппарата (ЛА)
имеющую положительное V крыла, закрепленную на проволоке проходящей через
продольную ось (от носа до хвоста через ЦТ) модели. Если модель накренить и с
силой толкнуть вдоль проволоки, модель не будет выравниваться по крену. Потому,
что без бокового скольжения нет восстанавливающей силы, только демпфирующие
силы (как было рассмотрено в первой части).
Модель управляемая только при помощи РВ и РН, должна иметь существенное V крыла.
При отклонении РН, эффективный угол атаки внешней (относительно поворота)
консоли увеличивается, вызывая крен в сторону поворота. (Без V крыла отклонение
РН приведет к отклонению носа модели – рысканию в сторону поворота но крен не
возникнет). При правильном выборе V крыла и площади вертикального стабилизатора,
модель, после задания крена, продолжит разворот с постоянным креном, после того
как РН будет возвращен в нейтральное положение.
Мы часто думаем, что паразитное рыскание это прямой результат отклонения
элеронов. Потому, что отклонение элеронов дифференциально влияет на
сопротивление консолей. Модель отклоняется по оси рыскания в направлении
отклоненного вниз элерона, делая противоположное от того, что мы хотим. Поэтому
требуется отклонение РН для противодействия паразитному рысканию, что существенно
увеличивает сопротивление во время поворота.
Но есть еще одна причина возникновения паразитного рыскания. Вращение одной
консоли вниз, а другой вверх вызывает изменение углов атаки и следовательно
сопротивления противоположных консолей. Но кроме этого происходит отклонение
векторов подъемной силы. На опускающейся консоли, вектор подъемной силы
отклоняется вперед , а на поднимающейся консоли назад, это изменение вызывает
значительный момент рыскания, независимо от профильного сопротивления
связанного с отклонением элеронов. Эффект от сопротивления элеронов это намного
меньшая часть, чем дает этот паразитный эффект.
Путевая устойчивость и спиральная неустойчивость.
При управлении планером, если площадь вертикального стабилизатора слишком
велика, пилоту требуется постоянно корректировать направление полета модели.
Это происходит потому, что планер поворачивает в сторону любого бокового
скольжения и кренится более сильно.
Если положение планера не корректируется, рыскание и крен постепенно
увеличиваются и планер входит в спираль уменьшающегося радиуса с
увеличивающейся скоростью, по направлению к земле.
В дополнение к эффекту от избытка путевой устойчивости, свою часть вносит
большой размах при большом удлинении. Внешняя консоль двигается (в повороте) с
большей скоростью, чем внутренняя, и соответственно возникает разница в
подъемной силе на противоположных консолях и в результате увеличение крена.
Эффект сильней проявляется у крыльев большого размаха и большого удлинения на
малой скорости.
Уменьшение площади вертикального оперения уменьшает путевую устойчивость и
увеличивает спиральную устойчивость. Увеличение V крыла так же увеличивает
спиральную устойчивость. Нужно заметить, что все полноразмерные ЛА склонны, в
какой-то степени, к спиральной неустойчивости.
Излишнее V крыла имеет свои недостатки. При боковых порывах ветра, могут
возникать большие углы крена, что очень мешает при посадке с боковым ветром.
Так же увеличивается склонность к голландскому шагу, особенно на большой
скорости.
Голландский шаг.
Боковые порывы ветра, воздействуя на крыло или вертикальный стабилизатор, могут
вызывать сложное характерное колебательное движение, состоящее из крена и
рыскания, которые действуют в противофазе. Сначала возникает крен и рыскание в
одном направлении, затем восстанавливающие силы действуют с избытком, приводя к
рысканию и крену в противоположном направлении. При виде сзади хвост двигается
по дуге.
Сам по себе голландский шаг не опасен, но создает значительное сопротивление.
На обычных классических моделях голландский шаг возникает на больших скоростях,
при недостаточной путевой устойчивости и избыточной устойчивости по крену.
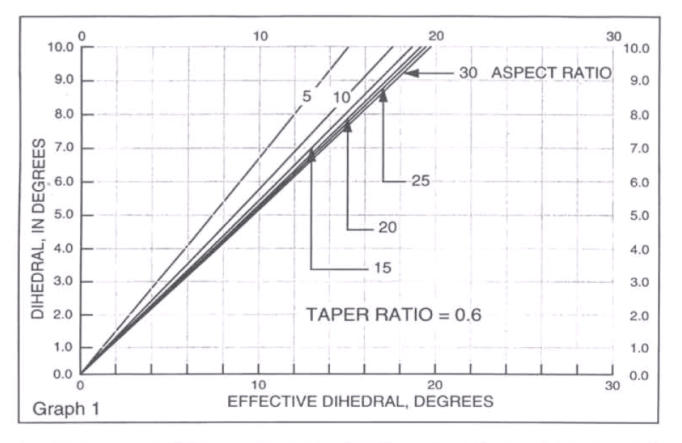
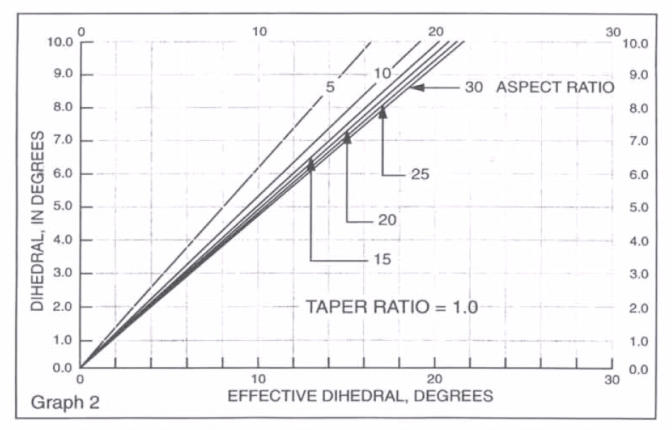
Влияние величины сужения крыла на эффективное V крыла.
Определим сужение как отношение концевой хорды к корневой.
Для трапецевидного крыла, увеличение эффективного V может быть получено по
формуле:
p2_01 p2_03 p2_02
Соотношение между эффективным V и сужением отображено на графиках. При
увеличении коэффициента сужения (концевая хорда увеличивается) эффективное V
увеличивается.
Это связано с тем, что участок крыла ближе к концу сильнее влияет на
устойчивость по крену из за большего плеча приложения силы.
В следующей части: Влияние стреловидности и винглет (концевых шайб) на V крыла.
Метод оценки эффективного V, в зависимости от параметров ЛА. Одна сложная
формула и одна простая формула.
Часть3. Стреловидные крылья и эффективное V крыла.
На устойчивость и управляемость ЛА, влияет не только геометрическое V крыла, но
и эффективное его значение. В первой части мы упоминали, как положение крыла
относительно фюзеляжа, меняет эффективное V крыла. Крыло в верхней части
увеличивает эффективное V на 3-8 градусов . Крыло в средней части не изменяет
эффективное V . Крыло в нижней части уменьшает эффективное V на 3-8 градусов.
pn
В этой части мы рассмотрим, как влияют на эффективное V крыла, стреловидность и
винглеты, и определим как рассчитывается полное эффективное V крыла. Так же
рассмотрим способы его уменьшения в случае его избыточности.
В идеальном мире самолет имел бы изменяющий площадь вертикальный стабилизатор и
изменяющееся V крыла. На таком самолете, V крыла должно уменьшатся, а
вертикальный стабилизатор увеличиваться при увеличении скорости, и наоборот, V
крыла должно увеличиваться, а вертикальный стабилизатор уменьшаться на малой скорости.
Представьте себе такую модель, на которой V крыла и размер вертикального
стабилизатора изменяются в зависимости от скорости полета, автоматически
приспосабливаясь так, чтобы обеспечивать оптимальную устойчивость и
управляемость.
Как известно стреловидность крыла влияет на эффективное V крыла. Вот формула
этой зависимости:
Что важно в этой формуле, так это влияние коэффициента подъемной силы на
эффективное V крыла. Чем больше коэффициент подъемной силы (CL) тем больше
эффективное V крыла. Так как коэффициент подъемной силы зависит от скорости,
значит и эффективное V крыла зависит от скорости. Чем выше скорость, тем меньше
эффективное V крыла, и чем ниже скорость, тем выше эффективное V крыла. Но это
ведь именно то, что нам нужно.
Эффективное V крыла, прямо пропорционально углу стреловидности (измеренному по
линии половин хорд крыла). Величина стреловидности, обычно не больше 25
градусов, обеспечивает величину эффективного V крыла, которая позволяет
получить наилучшие характеристики во всем диапазоне скоростей. Большие углы
стреловидности негативно влияют на скос потока вдоль размаха крыла и на его
аэродинамические характеристики.
В увеличении эффективного V крыла на малой скорости есть и отрицательный
эффект. Повышенная устойчивость стреловидных крыльев, ухудшает управляемость по
крену, которая на малых скоростях может быть ниже приемлемого уровня. Поэтому
на стреловидных крыльях является обязательным наличие увеличенных элеронов с
достаточной эффективностью при небольших отклонениях.
Кроме влияния на эффективное V крыла стреловидности и расположения относительно
фюзеляжа есть еще меньшее по значимости влияние формы законцовок и наличия и
размеров винглет (концевых шайб).
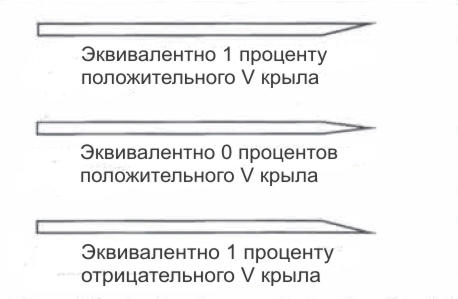
Влияние формы законцовок крыльев небольшое но все же заметное.
Винглеты (концевые шайбы).
И последний рассматриваемый фактор это винглеты. Чаще всего используемые на ЛК,
расположенные сверху крыла винглеты, существенно увеличивают эффективное V
крыла.
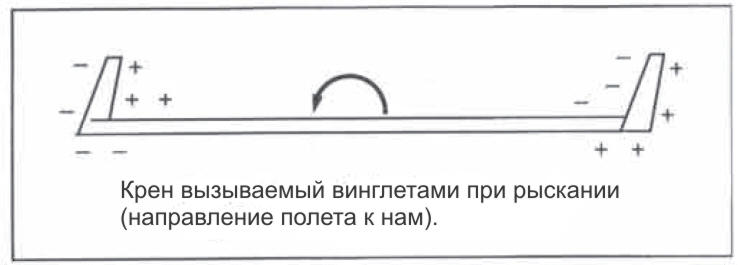
Если винглеты расположены на прямом крыле сверху, и крыло отклонилось по оси Z
(имеет не нулевой угол рыскания), передний винглет при этом будет вызывать
увеличение подъемной силы концевой части крыла. Отклоненный назад винглет будет
вызывать уменьшение подъемной силы, части крыла где он расположен. Общий
результат будет в создании винглетами момента крена при рыскании.
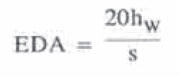
Приращение эффективно V крыла, при использовании винглетов, может быть
рассчитано по формуле. Где hw –высота винглетов, S –полуразмах крыла.
Из формулы можно увидеть, что чем больше высота винглетов, тем больше
эффективное V крыла.
Расчет суммарного эффективоного V крыла.
Эффективное V крыла ЛА, это сумма эффектов вносимых всеми компонентами:
сужением крыла геометрическим V крыла, стреловидностью крыла, расположением
крыла относительно фюзеляжа, коэффициентом подъемной силы, винглетами, формой
законцовок крыла и др.
Стреловидные крылья особенно с винглетами имеют избыточное эффективное V крыла.
Из за увеличения эффективного V крыла на малых скоростях, может ухудшаться
управляемость по крену, и проявляться голландский шаг особенно во время парения
или посадки.
Закрылки со стреловидной линией поворота, могут так сильно влиять на
эффективное V крыла, что управляемый полет становится невозможным.
Крутка у стреловидных крыльев, влияет на эффективное V крыла, уменьшая его.
Излишняя крутка может сильно уменьшать эффективное V крыла, иногда до
отрицательных значений на больших скоростях. В результате крыло не может летать
в инверте.
Противодействие избыточному эффективному V крыла.
К счастью, для корректировки избыточного эффективного V крыла, может быть
использовано уменьшение геометрического V крыла. Но расчет необходимой величины
отрицательного V крыла, во всех полетных режимах вызывает некоторые
затруднения. Это связано, в частности, с ограничением по величине
отрицательного геометрического V крыла.
Эффективное V крыла, при малых коэффициентах подъемной силы может быть таким
малым, что излишнее отрицательное геометрическое V крыла, будет приводить к
переворачиванию ЛА на больших скоростях. Или ЛА может стать статически
неустойчивым по курсу (static directional divergence).
Уменьшение эффективного V крыла, при наличии винглет, может быть достигнуто их
полным или частичным переносом на нижнюю сторону крыла. Или использованием
формы крыла типа «чайка», когда большая часть крыла может иметь положительное
геометрическое V крыла, а законцовки отклонены вниз.
В 3й части в формуле: Clβ – момент крена в
зависимости от угла скольжения. Значение 0,00021 соответствует 1 градусу
положительного эффективного V крыла.
4 Часть. Стреловидные крылья и эффективное V крыла.
В третьей части мы рассмотрели как стреловидность и винглеты влияют на
эффективное V крыла.
В этой части мы на примере разберем оценку общего эффективного V крыла и
простой способ его уменьшения в случае его избыточности.
Так же Эдуард Молфино расскажет об особенностях поведения некоторых ЛК, в
частности о плоском вращении.
Эта серия из четырех частей будет завершена перечислением основных выводов и
списком ссылок на более подробные источники информации.
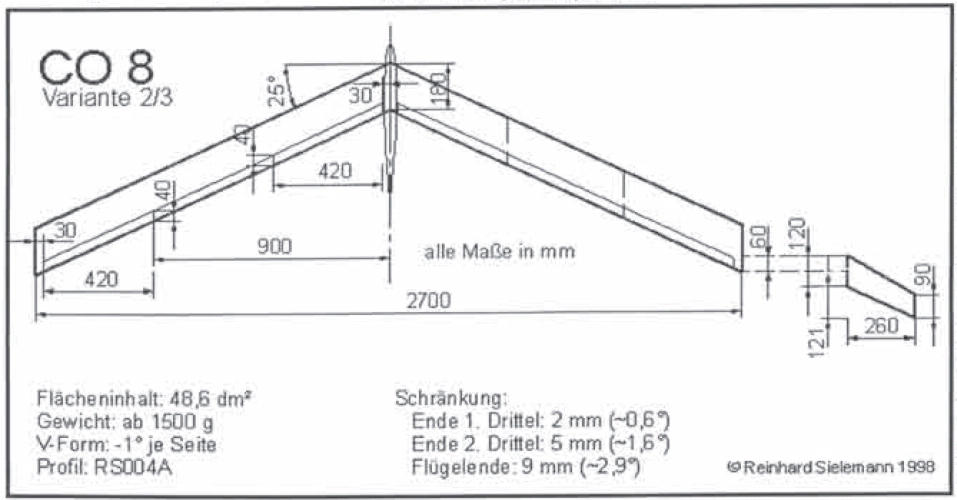
Пример оценки общего эффективного V крыла.
С08 V2/3, это последняя модель Ганса-Юргена Анверферта. Имеет 1 град
отрицательного геометрического V крыла.
Давайте посмотрим на различные составляющие эффективного V крыла присущие
конструкции этой модели. При стреловидности 25 и наличии винглет, скорее всего
требуется компенсация избыточного эффективного V крыла.
Винглеты вносят 3,85 град. V, и при Сl = 0,1 эффективное V крыла от
стреловидности составляет 1,5 град. В результате разница между геометрическим V
крыла (-1,0 град.) и эффективным (3,85+1,5 =5,35 град.) составит 4,35 град. Эта
величина, дает достаточную устойчивость и не слишком большую вероятность
переворачивания в инверсный полет, при попадании в турбулентность.
При парении Сl = 0,6, эффективное V крыла составляет 15 град. (3,85+11,2), что
за вычетом 1 град. будет 14 град. эффективного V крыла. Эта величина, не такая
большая как может казаться (см. Blane Beron-Rawdon’s "Spiral Stability and the
Bowl Effect”).
При таком значении эффективного V крыла, С08 V2/3, выполняет полет с креном ,
при парении, без необходимости корректировки (без рук).
Кроме того, при отрицательном геометрическом V, буксировочный крюк поднимается
относительно ЦТ, таким образом плечо приложения натяжения леера уменьшается,
предотвращая переворачивание в начальный момент «затяжки» леером.
Отрицательное V и плоское вращение.
Эдуард Молфино, моделист много экспериментирующий с ЛК, говорит: « Я столкнулся
так же с проблемами проявляющимися в экстремальных условиях. Основной
проблемой, возникающей на многих моделях, была тенденция к плоскому вращению,
при парении или повороте с сильным креном. Более устойчивые модели попадали в
плоское вращение только при сильной турбулентности.
Потеря высоты необходимая для выхода из плоского вращения была разной для
разных моделей, и составляла от нескольких метров до бесконечности. Некоторые
модели не выходили из плоского вращения, что бы я не делал с управлением, и
только земля останавливала их.
После многочисленных экспериментов, я нашел простой способ, заключающийся в
подъеме ЦТ. Это приводило к нестабильности в плоском вращении и выходу из него
в перевернутый полет. Небольшое V крыла завершало решение проблемы плоского
вращения.
Выводы:
- Спиральная неустойчивость вызывается чрезмерно большой площадью вертикального
стабилизатора (из за избыточной путевой устойчивости).
- ЛА имеющий слишком большую боковую устойчивость, и большое V. Будет иметь
путевую неустойчивость и склонность к голландскому шагу.
- В голландском шаге направление поворота всегда в противофазе с креном.
- Причины спиральной неустойчивости и голландского шага действуют
взаимнопротивоположно.
- Эффективное V крыла не изменяется при изменении угла атаки если крыло не
имеет стреловидности. Эффективное V крыла увеличивается с увеличением
коэффициента подъемной силы, если крыло имеет положительную стреловидность.
- Положительный эффект отрицательного геометрического V крыла: уменьшение
эффективного V крыла на больших коэффициентах подъемной силы.
Стреловидные ЛК способны демонстрировать прекрасную спиральную устойчивость при
парении в терме, из за увеличения эффективного V крыла на больших коэффициентах
подъемной силы. Так как эффективное V крыла уменьшается при уменьшении
коэффициента подъемной силы, они не проявляют тенденции к голландскому шагу на
высокой скорости. Это важные преимущества стреловидных ЛК перед ЛА обычной
схемы.